|
Kerbal Space Program
1.12.4
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Properties Events Macros
|
Kerbal Space Program
1.12.4
|
Public Member Functions | |
| Part | GetHostPart () |
| Return an instance of the part. More... | |
| Transform | GetLocalTransform () |
| Return an instance of the module's transform. More... | |
| void | OnDriveModeChanged (ActiveJoint.DriveMode mode) |
| Called when the drive mode of the joint changes. Use to keep track of the drive mode in case it changes for external reasons (like joint being destroyed, or vessel going on rails which sets the drive on Park) More... | |
| void | OnJointInit (ActiveJoint joint) |
| Called whenever the activeJoint's joint is modified. Will be called when the joint is first started, when the joint is destroyed, and again if a new one is re-created. Use to toggle joint-dependent behaviour on the module. More... | |
| Part IActiveJointHost.GetHostPart | ( | ) |
| Transform IActiveJointHost.GetLocalTransform | ( | ) |
Return an instance of the module's transform.
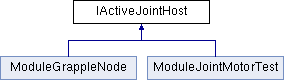
Implemented in ModuleGrappleNode, and ModuleJointMotorTest.
| void IActiveJointHost.OnDriveModeChanged | ( | ActiveJoint.DriveMode | mode | ) |
Called when the drive mode of the joint changes. Use to keep track of the drive mode in case it changes for external reasons (like joint being destroyed, or vessel going on rails which sets the drive on Park)
| mode |
Implemented in ModuleGrappleNode, and ModuleJointMotorTest.
| void IActiveJointHost.OnJointInit | ( | ActiveJoint | joint | ) |
Called whenever the activeJoint's joint is modified. Will be called when the joint is first started, when the joint is destroyed, and again if a new one is re-created. Use to toggle joint-dependent behaviour on the module.
| joint | a reference to the joint created, or null if the joint is lost |
Implemented in ModuleGrappleNode, and ModuleJointMotorTest.
 1.8.7
1.8.7